

Vista submarina de una red de fitoplancton haciendo su trabajo. Fuente: Geir Johnsen / NTNU
El fitoplancton marino o el plancton vegetal son extremadamente importantes para la vida en la Tierra. Cuando hacen su trabajo de convertir la luz solar en energía, producen el 50 por ciento del oxígeno que respiramos.
No es de extrañar que los científicos quieran saber cómo el cambio climático y el calentamiento de los océanos podrían afectar a estas pequeñas fábricas de oxígeno flotante, especialmente porque forman la columna vertebral de las redes alimentarias marinas y, por lo tanto, apoyan la producción de zooplancton y peces.
Pero contar e identificar el plancton es increíblemente difícil. Es como buscar un millón de pequeñas agujas en un enorme pajar, excepto que tanto el pajar como las agujas se mueven constantemente a través de vastas extensiones del océano, en el espacio y en el tiempo.
Ahora el archivo cooperación interdisciplinaria Los científicos de NTNU y sus colegas de SINTEF Ocean están trabajando en un robot inteligente, un vehículo sumergible autónomo ligero (LAUV), programado para encontrar e identificar diferentes grupos de plancton.
El proyecto de cinco años, llamado AILARON, recibió NOK 9,5 millones del Consejo de Investigación de Noruega en 2017. A principios de esta primavera, los científicos llevaron a LAUV para una prueba de manejo por la escarpada costa noruega.
Imagine, analice, planifique y aprenda
La colaboración involucra a científicos de los departamentos de ingeniería cibernética, tecnología marina y biología de la universidad.
Lo que es único es que LAUV utiliza toda la cadena de procesamiento de imágenes, aprendizaje automático, hidrodinámica, planificación e inteligencia artificial para “imaginar, analizar, planificar y aprender” en su trabajo.

La estrella del espectáculo: un vehículo sumergible autónomo ligero en un banco de trabajo antes del despliegue. Crédito: Annecken Nøland
Como resultado, el robot puede incluso estimar hacia dónde se dirigen los organismos flotantes, lo que permite a los científicos recopilar más información sobre el plancton a medida que los organismos se mueven a lo largo de las corrientes oceánicas. Piense en LAUV como una versión robótica de un perro rastreador de drogas real si el perro puede identificar las drogas en la bolsa e informar a sus manejadores hacia dónde se dirige.
“Lo que hace nuestro LAUV es mejorar la precisión, reducir la incertidumbre de la medición y acelerar nuestra capacidad de tomar muestras de plancton en alta resolución, tanto en el espacio como en el tiempo”, dijo Annette Stahl, profesora asociada de la División de Ingeniería Cibernética de NTNU, jefa de el proyecto AILARON.
Los enfoques actuales son limitados y requieren mucho tiempo
El muestreo de fitoplancton mediante métodos convencionales consume mucho tiempo y puede resultar caro.
“El análisis de muestras de fitoplancton, especialmente a altas resoluciones temporales y espaciales, puede costar mucho”, dice Nicole Aberle-Malzahn, profesora asociada del Departamento de Biología de NTNU, que forma parte del proyecto.
Sin embargo, la ventaja de los métodos más convencionales es que pueden proporcionar una gran cantidad de información, especialmente en términos de composición de especies y biodiversidad.
Pero la mayoría de las sondas colocadas en el barco o amarradas solo brindan instantáneas en el tiempo o el espacio, y si la información es recopilada por satélite, una imagen realmente grande de lo que está sucediendo en el océano sin muchos detalles.
Entra en el robot que rastrea a LAUV.

Maren Thu, de la estación biológica de Trondheim, utiliza un muestreador de agua de plexiglás diseñado por científicos de NTNU y construido en la universidad. El proyecto permite a los científicos tomar muestras de agua de manera rápida y eficiente en mares agitados. Fuente: Geir Johnsen / NTNU
La revolución robótica se encuentra con la inteligencia artificial
El robot LAUV, desarrollado por el grupo de investigación AILARON, parece un torpedo pequeño y delgado.
Tiene una cámara que toma fotografías del plancton en la parte superior del océano, en un área llamada zona fótica, que es tan profunda como la luz del sol puede penetrar. También está equipado con sensores de clorofila, conductividad, profundidad, oxígeno, salinidad, temperatura e hidrodinámica (DVL).
En un trabajo de campo reciente coordinado por Joseph Garrett, investigador de doctorado en el Departamento de Ingeniería Cibernética de NTNU, un grupo interdisciplinario de científicos se reunió en la estación de campo Mausund, en una pequeña isla frente a la costa del centro de Noruega, a unas tres horas en coche de Trondheim.
El objetivo era capturar la floración primaveral cuando el fitoplancton responde al aumento de la insolación asociada con la primavera y su biomasa comienza a explotar.
Los investigadores, dirigidos por Tor Arne Johansen, profesor del Departamento de Ingeniería Cibernética de NTNU, utilizaron imágenes hiperespectrales de drones y aviones pequeños para estimar el fitoplancton sobre la superficie del agua. También tenían imágenes de satélite para estimar la clorofila desde el espacio. Finalmente, el equipo de LAUV y el muestreador de plancton enviaron sus dispositivos de nuevo a la pista para rastrear la floración a través del tiempo y el espacio.
Los científicos confirmaron que el fitoplancton ‘floreció’ filtrando el agua de mar. Cuando los filtros de color blanco claro se volvieron marrones, sabían que la producción de fitoplancton en la columna de agua era alta.
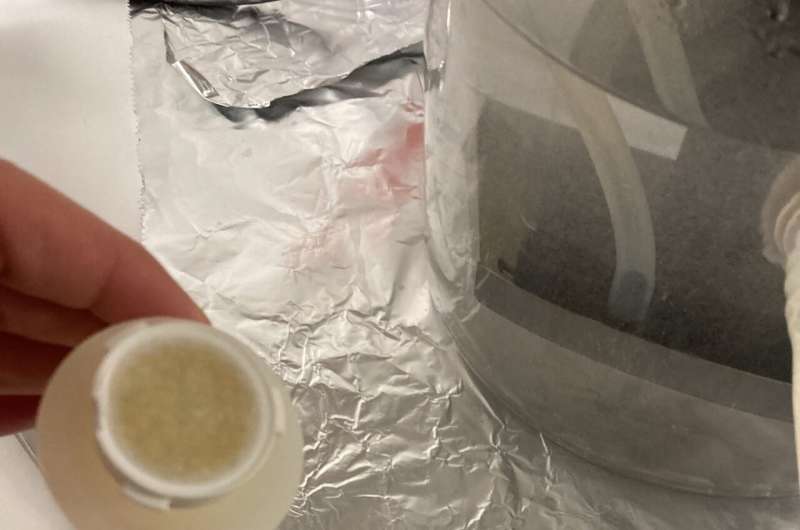
Los científicos pueden saber si el fitoplancton microscópico comenzó su “floración” primaveral filtrando el agua de mar. Si el fitoplancton está floreciendo y su número es alto, se enfocarán en el filtro y se volverán marrones. Crédito: Annecken Nøland
Seguimiento del adiestramiento del perro
El AUV puede mirar las imágenes y clasificarlas de inmediato, ya que con el tiempo se les ha “enseñado” a reconocer los diferentes grupos de plancton a partir de las imágenes que toman.
La computadora de a bordo también genera un mapa de densidad de probabilidad para mostrar el rango de superficie de los organismos detectados.
LAUV también puede decidir regresar a puntos críticos previamente detectados que contienen especies de interés en el área de estudio. Aquí es donde la gente de mantenimiento puede jugar un papel, ya que pueden “hablar” con LAUV cuando sea necesario.
Los científicos también pueden cambiar las preferencias de muestreo de LAUV en vuelo en respuesta a lo que encuentra, por lo que lo llaman una especie de perro de rastreo: puede detectar muestras interesantes y trazar un mapa del volumen que un barco de investigación podría llegar y seguir con el muestreo.
La información recopilada por los sensores a medida que LAUV recolecta muestras puede ayudar a determinar la dispersión y el volumen de las criaturas objetivo antes de que LAUV llegue al siguiente punto de acceso.
Puede predecir hacia dónde se dirigen las corrientes.
El plancton no puede nadar río arriba. En cambio, flotan en el agua y son sostenidas por las corrientes. Esto significa que los científicos necesitan saber qué está sucediendo con las corrientes.
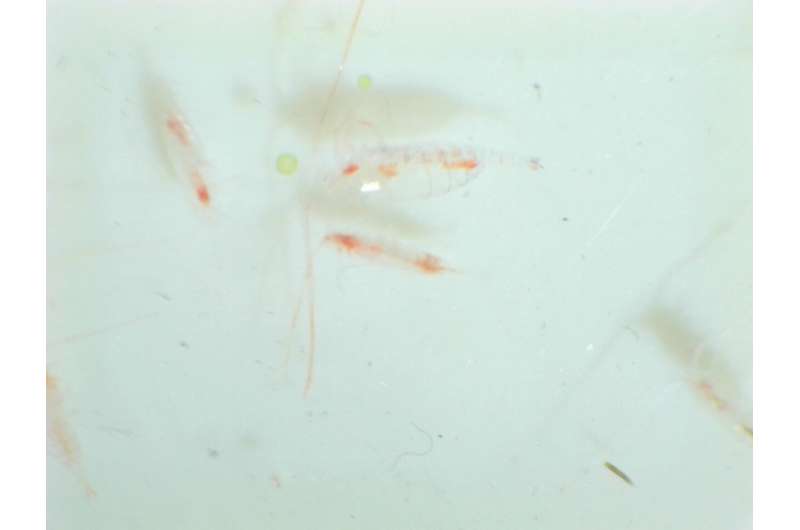
La imagen muestra una imagen ampliada del zooplancton tomada durante la prueba de campo. Crédito: Annecken Nøland
El perro rastreador LAUV tiene un equipo que le permite estimar las corrientes locales a varios niveles de profundidad. Luego calcula un modelo que puede predecir hacia dónde se dirige el plancton y que puede ayudar al LAUV a decidir dónde debe ir.
El procesamiento de imágenes y muestreo LAUV es un proceso llamado iterativo, lo que significa que el muestreo se repite y refina. Es como entrenar a un perro de rastreo a través de miles de sesiones de entrenamiento.
El objetivo general de LAUV es poder visitar el punto de acceso al plancton después de realizar una inspección inicial en una “cortadora de césped estacionaria”, que es casi lo que parece.
“El objetivo es que podamos comprender las estructuras de la comunidad y la dispersión en relación con los procesos biológicos de la columna de agua”, dijo Stahl. “Y el uso de LAUV nos permite recopilar esta información; nuestro LAUV, por ejemplo, puede funcionar hasta 48 horas”.
Muchos detalles en el tiempo y el espacio.
Stahl dijo que el uso de tecnologías LAUV inteligentes ayuda a evaluar las condiciones biológicas, físicas y químicas en un área con alta resolución temporal y espacial.
“Nunca podríamos haber obtenido esta resolución utilizando métodos tradicionales de muestreo de plancton”, dijo. Por lo tanto, proyectos como AILARON pueden ayudar a aumentar nuestra comprensión del estado de los ecosistemas y aumentar nuestra capacidad para supervisar y gestionar los ecosistemas en las condiciones futuras de los océanos.
Geir Johnson, biólogo marino del Departamento de Biología de NTNU (NTNU) y científico clave del Centro de Operaciones y Sistemas Marinos Autónomos (AMOS) de la universidad, está de acuerdo.
“Queremos obtener una visión general de la distribución de especies, la biomasa y la salud en el tiempo y el espacio”, dijo. “Pero para hacer eso, tenemos que usar robots submarinos que llevan instrumentos”.
Encontrar y contar las “agujas en los pajar” del océano
No es fácil contar organismos microscópicos en el gran océano azul. Éstos son algunos de los enfoques más comunes.
Rejillas de plancton:
- Aquí es donde los científicos arrastran redes de fito y zooplancton especialmente diseñadas detrás del barco para recolectar muestras, o usan muestreadores de agua para recolectar agua de mar de diferentes profundidades, de modo que incluso las fracciones unicelulares más pequeñas de plancton puedan analizarse cualitativa y cuantitativamente. .
- La desventaja es que las redes de plancton no pueden decirles a los investigadores si el plancton está en los lóbulos o si está muy extendido. Sin muchas muestras a lo largo del tiempo, los científicos no pueden determinar qué tan representativa es su muestra y cómo esto refleja la mayor abundancia y composición de la comunidad de criaturas en el área.
Muestreadores amarrados:
- Este podría ser un sonar anclado localmente que envía ondas de sonido a través del agua que se refleja en el zooplancton y puede recopilar información siempre que el monitor esté amarrado en el agua.
Imágenes de satélite:
- Las imágenes de satélite podrían permitir a los científicos medir la cantidad de clorofila a en el agua.
- La clorofila a es una sustancia contenida en el fitoplancton que les permite convertir la energía luminosa en energía unida químicamente.
- También se puede utilizar como sustituto de la biomasa de fitoplancton porque cuanto más clorofila a hay como pigmento común para todas las algas fotosintéticas.
- Esto les da a los científicos una imagen realmente amplia de la biomasa fotosintética en la superficie del océano, pero no contiene muchos detalles.
Observación avanzada del océano gracias al robot explorador móvil controlado por inteligencia artificial, Oceanografía (2020). DOI: 10.5670 / oceanog.2020.307
Entregado por
Universidad Noruega de Ciencia y Tecnología