
Fuente: arXiv: 2103.14295 [cs.RO]
Un equipo de investigadores de la Universidad de California en Berkeley ha construido un robot de dos patas capaz de aprender a caminar de forma independiente mediante el aprendizaje por refuerzo. El equipo escribió un artículo que describía su trabajo y lo subió al servidor de preimpresión arXiv.
El trabajo incluyó la construcción robot que consta de un par de patas conectadas entre sí y conectadas a un pequeño marco de sujeción. Actualmente, el robot está realizando sus tareas atado a un marco, el cual es guiado por uno de los investigadores. Comparado con otros robots, como varios fabricados por Boston Dynamics, el robot parece primitivo. Pero el robot, que el equipo llamó Cassie, representa una vanguardia en un nuevo tipo de tecnología, donde el robot aprende a caminar en lugar de aprenderlo a través de programación directa o expresiones faciales.
El aprendizaje por refuerzo es el tipo que exhiben los humanos: los bebés aprenden a caminar probando nuevos movimientos. No comprenden todo el proceso de inmediato, pero recuerdan los pasos que conducen a caminar. Luego, se basan en lo que han aprendido, agregando más información, lo que eventualmente lo llevará a enderezarse. Pero no se detienen ahí; están aprendiendo constantemente y, a medida que lo hacen, mejoran en ello. Con el tiempo, aprenden nuevos trucos como correr, saltar e incluso saltar en la acera.
Para ayudar al robot a aprender a caminar de la misma manera, los investigadores comenzaron con simulación robot en un mundo virtual. En la simulación, se entrenó al robot en información que describe objetivos, como caminar en posición vertical; el motor de IA podía recordar y usar lo que había aprendido. La simulación permitió al robot aprender a caminar sin dañar el equipo real y aceleró el proceso.
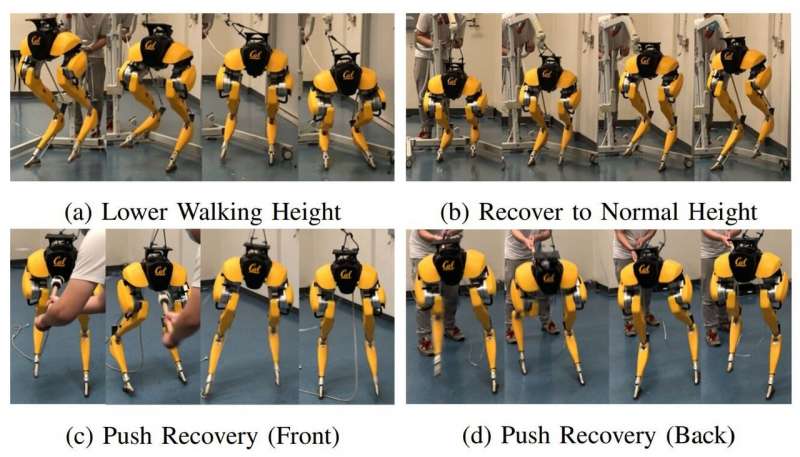
Después de que el robot aprendiera a caminar en la simulación, los científicos le transmitieron sus conocimientos a Cassie, quien lo usó para caminar de una manera similar a la de un niño pequeño. Cassie continuó sus estudios como una niña. Aprendió a no caer en un ligero deslizamiento o recuperar fuerzas cuando se la empujaba desde un lado. También aprendió a compensar la falla de dos de sus motores. Los científicos planean seguir trabajando con aprendizaje reforzado en robots para ver hasta dónde pueden llegar.
Aprendizaje de amplificación para un control de locomoción robusto y parametrizado de robots bípedos, arXiv: 2103.14295 [cs.RO] arxiv.org/abs/2103.14295
© 2021 Science X Network